Safety First, Utah State University and the National Science Foundation
Darcy Conlin
Due in part to a grant from the National Science Foundation (NSF), Utah State University (USU) Professor Ryan Gerdes is working for a safer future. Professor Gerdes wants to ensure that our future vehicles are built safe and secure from the get-go. To that end, NSF has funded $1.2 million to a research team that includes Professor Gerdes from USU, along with colleague Kevin Heaslip from Virginia Tech and others who are all working together to lead the way. This funding is part of USU’s record year for sponsored funding that has brought the highest level of external support ever recorded to the University.
![]()
Previously, the NSF has funded a number of research programs at USU, but this is the first grant of which Gerdes has been the Principal Investigator (PI). Professor Gerdes has worked on grants related to transportation security from other  funding agencies such as Mountain Plains Consortium and the Department of Energy. The current grant from NSF allows Gerdes to assume full responsibility for research study and training of the research assistants.
funding agencies such as Mountain Plains Consortium and the Department of Energy. The current grant from NSF allows Gerdes to assume full responsibility for research study and training of the research assistants.
With a background in electromagnetism and physical layer security, Professor Gerdes got involved with cyber security because a USU colleague was working on an automated vehicle project and asked him to look at the security. “We sort of went from there and spun it off into its own project.” says Gerdes.
As PI of this grant, Professor Gerdes wants to ensure that our vehicles of the future are built to be the safest they can be from the very first design. His goal doesn’t include air bags or crumple zones to absorb the impact of a collision. His goal is to address the potential security threats that are inherent in our automated, connected vehicles of the future. Professor Gerdes wants to prevent a devastating accident that is caused by a cyber attack. If that type of an attack occurs, the negative impact on the entire industry will be felt as people’s trust in autonomy is shrunk. How does Professor Gerdes intend on doing this? With  no comedic humor intended, think BattleBots from Comedy Central’s turn of the millennium network show.
no comedic humor intended, think BattleBots from Comedy Central’s turn of the millennium network show.
When it comes to securing our cars, up until now we’ve really only had to think about locking our doors to prevent theft or turning on a car alarm. In the US, our concerns have included varying degrees of car jacking, which (while rare for severe occurrences) did see approximately 38,000 per year according to the National Crime Victims Survey from 1993-2001.
In regards to cyber security within connected vehicles of the future, Professor Gerdes says that auto manufacturers are often hesitant. He states, “Many auto manufacturers share the premise that, ‘You show me that there’s a problem and we’ll do something about it.’” Manufacturers insist that the issues be shown on their models, not another manufacturer, under specific conditions. Overall, the auto industry has been reluctant to approach this topic. It takes researchers buying components, reverse engineering and figuring out situations that may occur so that the results will start to wake up the auto industry. The research PI Gerdes has planned from this grant will address these scenarios and begin to shed some well-needed light on this subject. “People need to know that manufacturers are thinking about security. The general public needs to know that these vehicles have been designed with security in mind. That’s what we’re hoping the project is going to help with.”
The NSF grant duration is for four years and Professor Gerdes has the support of four PhD students and anticipates receiving additional funding to support four undergraduate students for that time as well. Overall, the team consists of about ten students, including those not supported directly by the grant. The budget includes funding for PI and co-PI time, stipends for graduate and undergraduates but also allows for the purchase of equipment necessary to implement and test potential countermeasures to attacks.
Professor Gerdes plans on building a fleet of high speed self-driving, connected vehicles. While the funding doesn’t include the procurement and use of an actual Mercedes or an Audi, it will allow the purchase of robots that are designed to go very fast and crash into things. These robots will not be the size of a regular automobile; instead they will weigh in around 20 pounds. 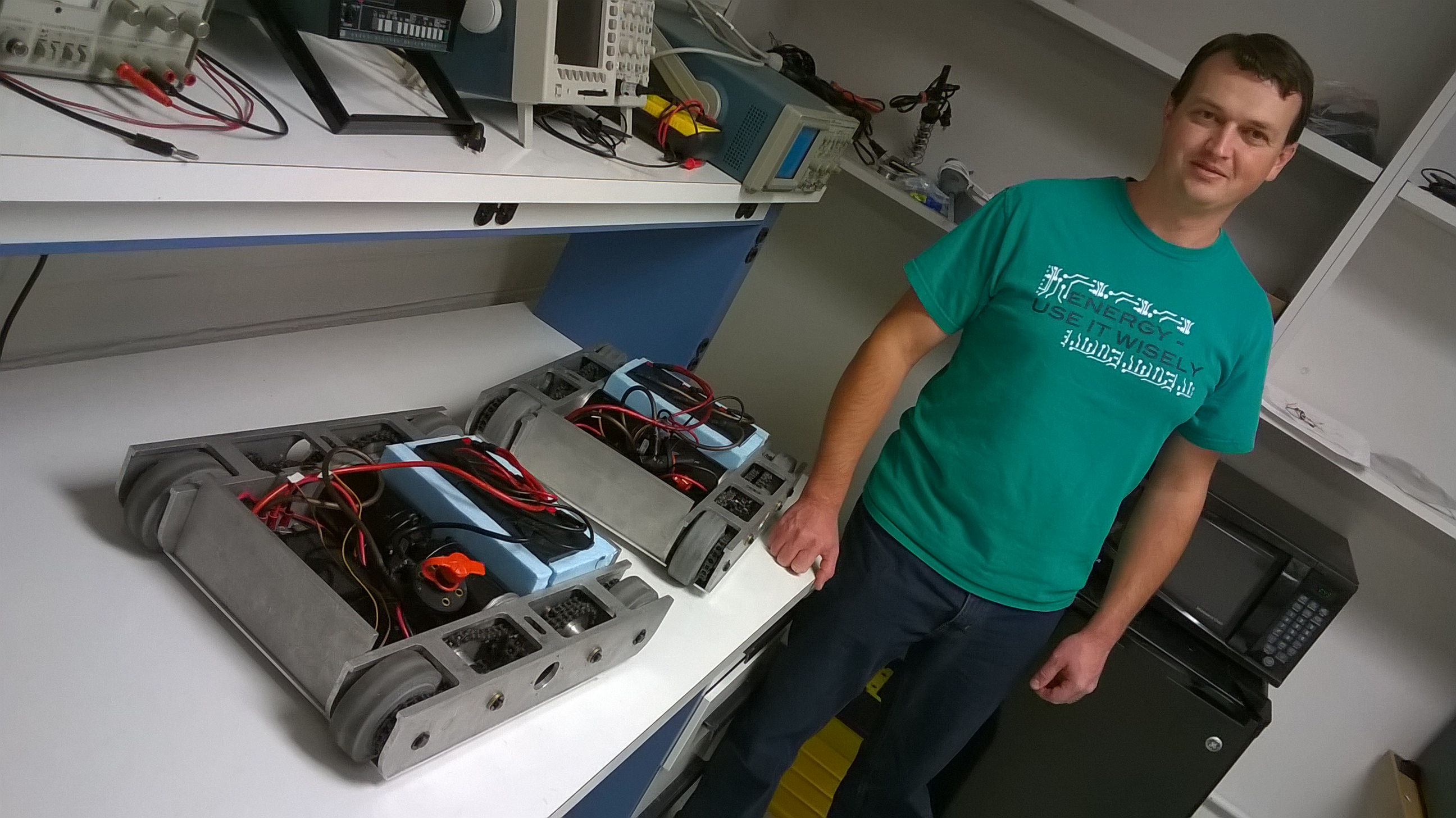 The plan is to get these robots going 35-45 mph and attack each other. They will be automated robots driving themselves around and then an attacker will be inserted in their midst. The results will be monitored and recorded.
The plan is to get these robots going 35-45 mph and attack each other. They will be automated robots driving themselves around and then an attacker will be inserted in their midst. The results will be monitored and recorded.
Currently there are 8 robots in the lab. Professor Gerdes says they are putting the brains in now and expect to have fully automated robots in the Spring. Gerdes and his team are designing full lateral and longitudinal control of a 10 vehicle platoon for a senior design project.  The robots will have DSRC (dedicated short range communication) radios attached to them and that is how they will ‘talk’ to each other.
The robots will have DSRC (dedicated short range communication) radios attached to them and that is how they will ‘talk’ to each other.
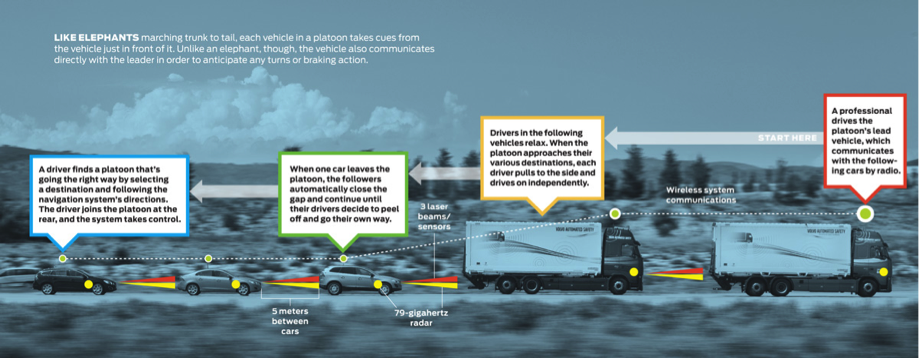
The research Professor Gerdes and his team is undertaking will focus on platooning. Platooning is when a number of different vehicles, for a certain period of time, are under coordinated control and drive closely together along the same path. The grant money will be used to find solutions to enable secure platooning under a variety of attack scenarios.
Professor Gerdes says, “What we want to do is ensure that automated vehicles are designed securely from the start. You can’t just tack on security to these systems. You have to design it at the beginning. We want to prevent that catastrophic accident that is caused by a cyber attack that is going to cause people to lose faith in their vehicles. We believe that automated and autonomous vehicles are necessary and we want to be sure that the public will embrace them.”
Isolated vehicles are important from a security perspective as well, but what Gerdes and his colleagues feel it is more interesting when you have a whole bunch of vehicles that are interacting together. In this case, if you have a system of interacting vehicles an attacker might be able to leverage the trust placed in them to create some catastrophic accident. Or, in a less extreme case, just cause a slow down or even more simply, discomfort or irritate other drivers. An attack can come in many different forms.
Professor Gerdes thinks the most difficult part of the project is fitting all of the pieces together: the problems they have to address span several disciplines and will require the team members be willing to look outside of their area of expertise to learn new things, in order to find solutions. “Luckily,” Gerdes shares, “the team is large and multi-disciplinary.”
For near term connected vehicle problems, Gerdes says their work is applicable to verifying that a vehicle is actually where it says it is. If a vehicle is transmitting a message that says, ‘I’m at the scene of an accident, here are the coordinates of that accident. You should divert and change your path so you don’t come near it.’ How do we know that vehicle is actually where it says it is? How do we authenticate messages without a public key infrastructure (PKI)?
However, Professor Gerdes says they are really focusing on 20 years in the future, when vehicles are automated and they’re connected, sharing information of where they are, where they want to go, and there’s some aggregator that’s able to process this information and provide optimized travel flow. But this requires that vehicles be automated for safety and connectivity so they can share information in order to optimize the traffic flow. He points out, “We are already doing this in a non-automated way, in that many people, while on the road will use their phone to access Google Maps and dynamically route their vehicle based on traffic estimates. We’re thinking that in the future this is going to happen all automatically. You’ll just tell your vehicles, ‘I’d like to get from here to here’ and it figures out the best way for this to happen. And based upon the information it’s receiving from surrounding vehicles as well as an aggregation service, it will choose the routes. But we need connected vehicles in order to make this happen.”
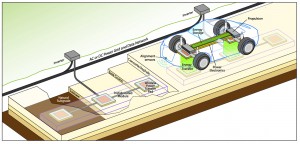
So where will this BattleBot take place? USU’s Electric Vehicle & Roadway (EVR) Research Facility and Test Track. Construction of the track is currently in progress and estimated to be complete by early Spring 2015. Just in time for 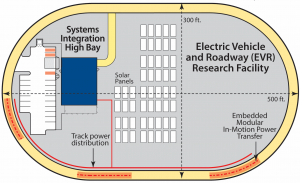 Professor Gerdes, his team and their fleet of robots to take to the track. The state-of-the-art facility will be a 4,800 square foot, high-bay research building and a surrounding electrified one quarter mile test track. Gerdes humbly states, “We might not have a test facility like Michigan or the new one that’s going up for Google, but we have enough space that we can still run automated vehicles around a test track in order to test out attacks. The test track slated for construction this year will be a proving grounds for the safety and automation protocols that will make transportation with driverless vehicles possible.”
Professor Gerdes, his team and their fleet of robots to take to the track. The state-of-the-art facility will be a 4,800 square foot, high-bay research building and a surrounding electrified one quarter mile test track. Gerdes humbly states, “We might not have a test facility like Michigan or the new one that’s going up for Google, but we have enough space that we can still run automated vehicles around a test track in order to test out attacks. The test track slated for construction this year will be a proving grounds for the safety and automation protocols that will make transportation with driverless vehicles possible.”
Professor Gerdes said he is pushing his students to see if they can have something to demonstrate at the next Automation Workshop. The Vehicle Automation Workshop is a yearly gathering of industry, academia and private interests to discuss the current and future state of vehicle automation technology. He says, “We would like to be able to demonstrate a ten vehicle platoon that can be guided without lane markers and perform complicated maneuvers at 35 mph. Also a couple of attack scenarios.” He wants his team to show the world what they can do with these automated robots.
The findings for this research will be reported through conferences, journals and workshop publications. We hope to be able to share it with you here at www.driverlesstransportation.com when it becomes available. Furthering the research, Professor Gerdes hopes to ensure that the results are translated to products and technology that will provide a secure foundation for more automated efforts within the entire industry.
It will be an exciting couple of months as Professor Gerdes and his team of researchers begin to assemble the pieces and build the parts to engage the necessary scenarios for testing. Twenty pounds of robot moving at over 35 mph can be dangerous in and of itself, but inserting the unknown into that takes on a whole new perspective. Knowing that someone else is anticipating these situations to ensure our safety is reassuring. For Professor Gerdes at Utah State University, in his own words, he is most excited about the “opportunity to work in an area that is rich with unanswered questions, and knowing that the work will be important to the future of automated transportation and society.” Thank you, National Science Foundation and USU. Stay tuned.
