Platooning Takes to the Road
Darcy Conlin
This featured article looks at Peloton Technology Inc., a Menlo Park, California-based automated vehicle technology company focused on developing a system to reduce fuel consumption and improve the safety of trucks by using advanced sensing and communications. The word “pelotón” is Spanish for platoon — and platooning of trucks is precisely what Peloton Technology intends to foster. Dr. Josh Switkes is the CEO of Peloton and holds a PhD from Stanford University in Mechanical Engineering. After hearing Switkes speak at ITS CA in October, Driverless Transportation wanted to learn more about the company and what Peloton is doing within the industry.

Peloton has a team of 11 employees poised to rapidly growing as they work to develop their technology and deploy production systems in 2015. The company was formed in 2011 with the goal of creating a system that would allow pairs of trucks to share information on their braking and engine systems to help them travel more safely and save fuel. The team began conducting market research in 2011, building on many years of experience across the founding team. The four members of the founding team come from backgrounds in the automotive and truck industry, vehicle safety and dynamics, business development, public affairs and government. Switkes has been working on systems to make driving safer and more efficient for the last 12 years. After his PhD work at Stanford University on a vehicle control systems, including guaranteeing safety for lanekeeping assistance and steering wheel haptic feedback, Switkes developed production control systems for Volkswagen, Audi, and Tula Technology. Peloton’s Principal Scientist Chris Gerdes is also a Professor at Stanford and the Director of the Center for Automotive Research at Stanford (CARS). Prior to joining Stanford, Gerdes was the project leader for vehicle dynamics at the Vehicle Systems Technology Center of Daimler-Benz Research and Technology North America. In this role, he worked closely with Freightliner / Daimler Trucks North America. Peloton’s VP Product, Dave Lyons has decades of experience with Silicon Valley technology startups and worked for many years as a leader at IDEO. Among other work in the automotive space, Lyons was employee #12 at Tesla where he led the development of the Tesla Roadster. Steve Boyd, Peloton’s VP External Affairs, has over 20 years of experience in government, public affairs and business development, including serving as a White House assistant press secretary, a PBS Newshour reporter/producer and in business development for a range of technology companies. Peloton is funded by a mixture of angel investors and venture capital investors including Castrol innoVentures which is part of British Petroleum.

The trucking industry handles about 70% of the freight in the US. This makes trucking a vital part of the US economy. Dr. Switkes noted there is a saying in the trucking industry that “If you bought it, a truck brought it.” To be clear, Peloton is not about either driverless or autonomous trucks. Drivers are an integral part of the Peloton System. The system simply augments driver performance and safety and leverages the cooperative potential between pairs of trucks.
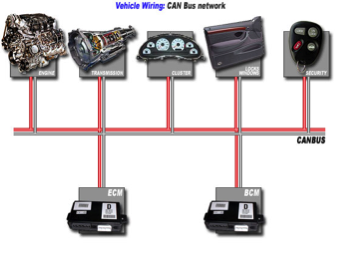
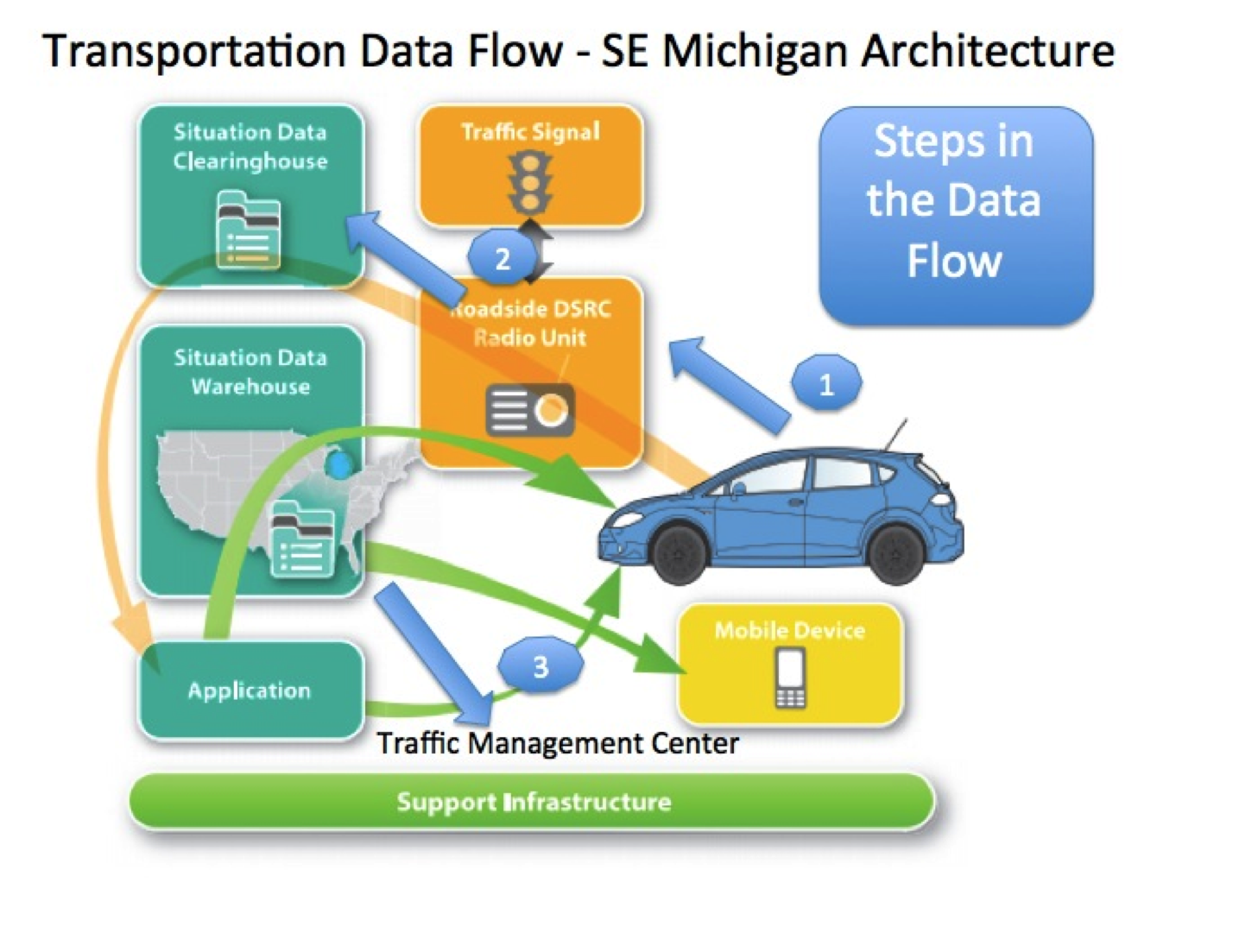
How does the system work? It is geared for tractor-trailers operating on multi-lane divided highways and it’s important to note that even when the trucks are safely linked, both drivers continue to steer and the role of first driver isn’t much different from today. The system adds forward collision mitigation radar to each truck making individual trucks safer while on their own. Using vehicle to vehicle (V2V) communications, these active safety systems are linked between pairs of trucks when they form up into a platoon. While out on the road, trucks that utilize the Peloton System will be notified by the Network Operation Center (NOC)[1] that they are coming into range of each other and can link up. The NOC helps trucks find each other on the road by identifying platooning opportunities so if Peloton equipped trucks are within V2V range, one truck can slow down and one can speed up in order to rendezvous.
The NOC is an Internet based cloud service that each truck connects to via either a cellular or Wi-Fi link. The NOC is separate from the V2V communication and is used to make sure the trucks are platooning only when it is safe to do so. These trucks are connecting on interstates and major highways, not residential areas. The NOC can also remotely adjust the following distance of the platoon for weather, traffic or other road conditions. The Peloton System shares much more than just the braking information between the trucks. Additionally, engine torque, acceleration and speed data is shared. Most importantly, forward collision mitigation radar and other active safety system data is shared between each pair of trucks increasing safety when they are in platoon. So whether the front truck is slowing down due to braking, a hill, a tire blow-out, or upcoming slower traffic, the information is instantaneously shared allowing the rear truck to react smoothly and immediately.
The key safety benefit comes from this assurance that the rear truck will react through V2V communication at the same time as the front truck. This essentially guarantees simultaneous braking between the two trucks. In a best-case scenario where a driver is operating manually, human reaction time ranges from 1-2 seconds even for a good driver. Peloton guarantees that every single time, even if the driver is distracted or has trouble seeing (for example the sun is in their eyes or it’s foggy) the system will react dramatically faster than an attentive human driver would under normal conditions. While a 1-2 second reaction time may not seem like much, at high speeds it definitely can be the difference between having an accident or not.
The biggest and most frequent accidents within the trucking industry are caused by frontal collisions. The brakes on most heavy trucks don’t react quickly because they use air brakes. With air brakes, there’s what is called a “brake lag” from the time the brakes are applied to when the truck actually begins to slow down. The Peloton System virtually eliminates that lag in paired trucks by using the V2V communication to apply the brakes in the rear truck at virtually the same time they are applied in the front truck. Switkes said, “We are not reacting to the front truck slowing down, we are reacting to the front truck applying its brakes. That can be the difference between safely braking and having an accident. In many cases we are actually applying the brakes in the rear truck before the front truck has started to slow down, because we are reacting to the application of brakes, as opposed to the actual slowing down.”
Peloton also increases safety by enhancing drivers’ awareness of what’s going on around each of the connected vehicles. Video is sent between the two trucks. There is a forward facing camera on each truck and video is sent so the driver of the rear truck gets the view from the perspective of the front truck. Therefore the rear truck can see what’s ahead on the road such as cars coming in on the shoulder from an on ramp. There are screens within the trucks cab that show the driver these views, mounted similarly to a rear-view mirror. Additionally, the video feed that comes from a rear truck allows the front driver to get a view of his/her own truck from behind. This is extremely effective in showing blind spots. Blind spot accidents are another major type of accident for heavy trucks. Driving a 72-foot tractor-trailer makes it difficult to know if another vehicle is next to you. According to Switkes, the Peloton System will help prevent accidents caused by blind spots.
We mentioned the driver is still steering but what else do they need to know in order to operate their vehicle? Switkes underscores that driver training is a key part of the system. The first time the system is turned on it will show the driver what it feels like to be platooning at a far distance. Then it will demonstrate what it feels like to be closer and experience an automatic braking event, not a hard braking event. The goal is to make sure that the first time the brakes are applied automatically is not a safety critical situation. Peloton does not want any surprises for the driver. The training includes driving with the system so drivers get a strong understanding and feel for the system.
Besides the safety benefits that Peloton offers, dramatic fuel efficiency comes from the aerodynamics of bringing the trucks closer together. Within a typical trucking fleet, fuel is about 40% of the operating cost so when talk of saving fuel comes up, trucking companies do take note. Peloton worked with the North American Council for Freight Efficiency and the major trucking fleet CR England to test their system and measure fuel economy in November 2013. This independently validated study followed the industry standard SAE Type II testing procedures and showed 10% fuel savings on the rear truck and 4.5% on the front truck. The results of additional comprehensive track testing performed by the U.S. Department of Energy will be issued in the next few months. These levels of fuel savings are enormous given that a typical trucking company spends $80-$100 thousand a year on diesel fuel for each long-haul truck. It’s estimated that the average savings from platooning with the Peloton system will amount to approximately $6,500 per year for each typical long-haul truck.
The fact that the rear truck saves more on fuel would likely make every fleet want their trucks to always be in the rear position, unless the two trucks are owned by the same company. However, a key part of the Peloton System is that trucks are ordered based on weight and braking ability. If there is an emergency stop, Peloton wants to be assured that the truck with the longest stopping distance is in the front of the platoon. For a given pair of trucks, the truck with the best braking ability and shorter stopping distance will be in the rear — and will get the better aerodynamic fuel savings. So trucks with the best combination of relative weight and good brakes will get the rear following position — and better fuel savings. In the rare instance that the braking ability is identical, Peloton may allow switching order, but Switkes says that will be unusual. In most cases there will be some difference in braking ability and the trucks will be ordered appropriately. If two trucks within the same company are traveling together, the order obviously won’t matter since the savings is across the same company.
Peloton Technology plans to have initial deployment with fleets that can easily adjust to have multiple trucks together on the road. The general public may not notice that many corporate fleets already travel in groups on our highways. Fleets like UPS and FedEx roll out trucks from their hubs based on the timing of when they finish sorting packages. According to Switkes, “Some fleets are sending out multiple trucks every day and they have to tell the drivers to leave a couple of minutes apart so that they don’t get backed up together at a stop light before getting on the interstate. So fleets like this only need to change their operation by telling two trucks, instead of one, to leave every few minutes.” For those owner operators with just one truck, there is the incentive to buy trucks with better brakes to better ensure being in the preferred rear platooning position. Switkes told us that some of the OEMs are already talking about having special platooning equipped trucks with better brakes.
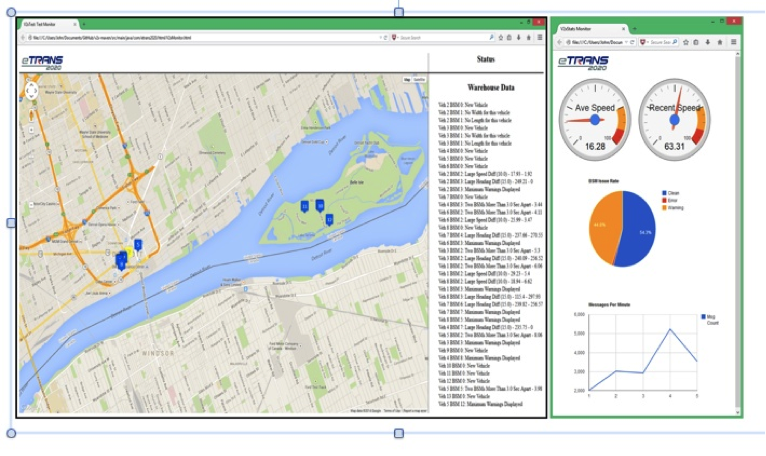
When will we see this in action? Peloton has already driven the system over 12,000 test miles across the west and southwest. Currently they are collecting and analyzing data in a ‘data pilot’ with the Tennessee-based fleet TCW. This pilot has sensors and cloud-based monitoring operating on two trucks that run close together, though not yet platooning, as they carry freight between Nashville and Memphis. This data pilot and others to follow soon will help inform fleets about the benefits of implementing platooning on major freight corridors and to demonstrate the system’s evolving telematics features. In Q1&2 2015, a series of major fleet pilots will get underway. The aim is to have full production systems ready for deployment by late 2015.
There are no obstacles at the federal level to inhibit Peloton from moving forward. NHTSA has no regulations that get in the way of platooning. However, at the state level, states have their own following distance (tailgating) laws and Switkes said there are some states where that law or related laws would seem to place limits on platooning. However, just as driving laws were not made with driverless operation in mind, following distance laws – some of which apply specifically for trucks – were not written when wirelessly-connected active safety systems were available. What Peloton has found is that states in the US understand the importance of trucking to their economy and are open to innovative ways to make their freight corridors safer and more efficient. Switkes says that they are working with the states that have limitations in their following distance laws to explain the issues at play and find solutions. The most important thing Switkes says on this is that “When we roll out our system on customer trucks, we will be absolutely sure that those trucks will NOT get pulled over for tailgating.”
The Peloton System will be offered as a usage-based managed service. Fleets will pay a one-time fee for System hardware and installation to equip trucks and then they will pay a per-mile fee when trucks are in platoon. A rapid payback period as quick as a few months is anticipated for typical long-haul trucks. Switkes has his Commercial Driver Learners permit and is on his way to getting his full license — so he won’t be on the road driving a Peloton-equipped truck just yet. However, he and his company are driving towards deploying V2V technology and truck platooning in a more concrete way than others in the industry. Things look positive for 2015.
[1] Peloton’s Network Operations Center (NOC) coordinates trucks to find linking partners on the road and enables cross-fleet platooning. Geo-fencing enables trucks to platoon only on appropriate roads (accounting for passing lanes, topography and other factors), in safe conditions, with safe drivers. (http://www.peloton-tech.com/about/)